Elektronikk 101 og Arduino
Mini Duster
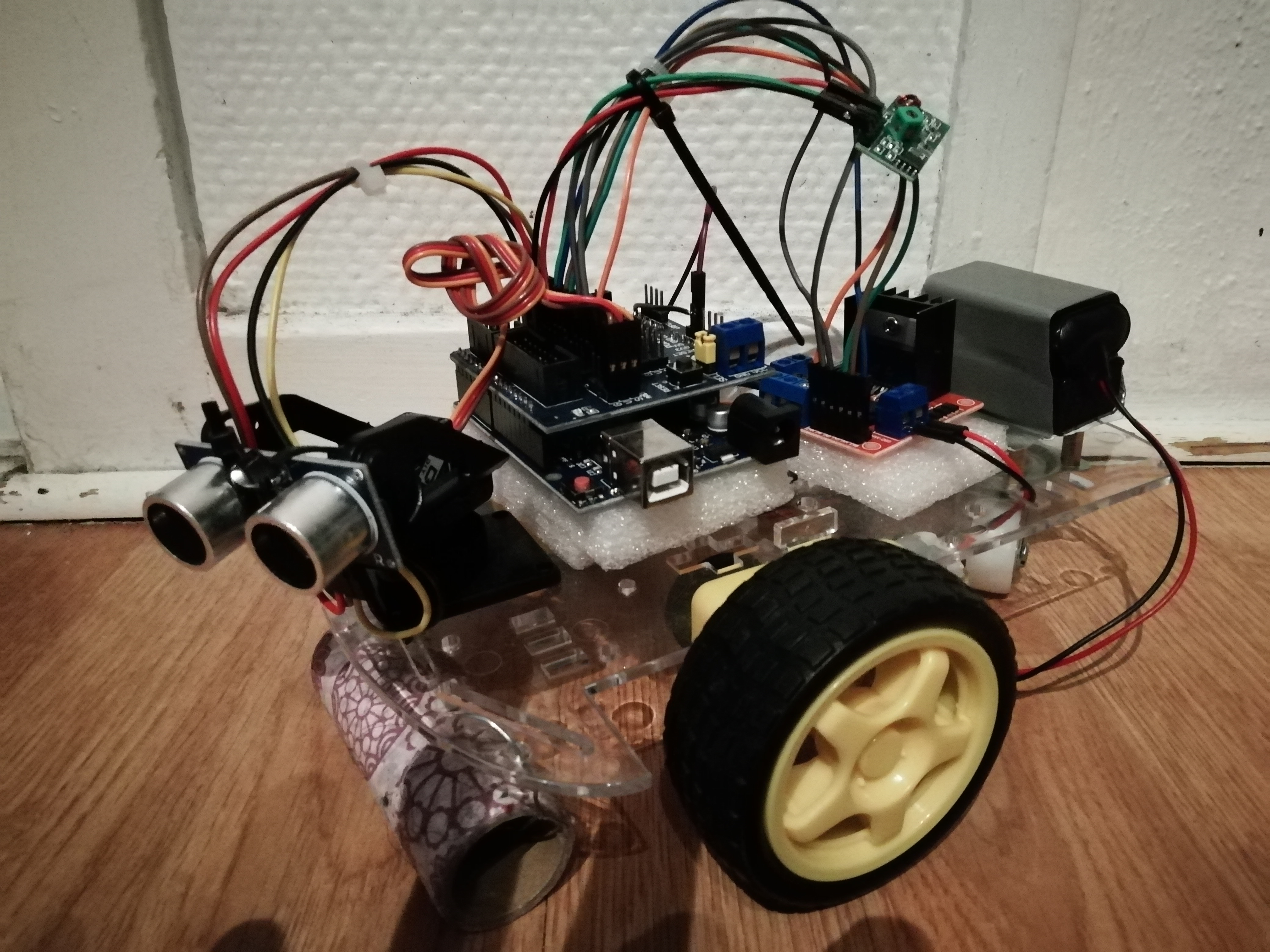
Her har jeg lagd en enkel RC bil med Arduino UNO. Den har en klisterrull festet foran som ser til at fanger opp støv mens den kjører. Her under er et bilde av bilen og en liste av brukt utstyr.
- 2 x Arduino uno
- 1 x Sensor shield
- 1 x L298 dual H-bridge
- 2 x Gear Motor
- 1 x Servo
- 1 x Ultrasonic sensor
- 3 x 9V battery
- 3 x wheels
- 1 x joystick
- 1 x RF 433Mhz module
Beskrivelse av deler
Jeg har brukt en "standard" plastskive for montering av motorer hjul og utstyr. Det er brukt en Arduino Uno med en sensor shield som gir enkel tilkobling av sensorer isteden for å bruke f.eks. breadboards.
Motorene er kontrollerte ved hjelp av en L298 modul, som i prinsippet er et kretskort som har to stk H-brygger for å kontrollere rettning på to motorer. Den har og en spenningsregulator. Den benytter tre pin for hver motor. To pin bestemmer hvilken rettning strømmen tar gjenom H-bryggen, og i tillegg er det en enable pin som bestemmer med hvilken hastighet motorene skal kjøres. Dette kan kontrolleres ved hjelp av PVW fra Arduino kortet.
Jeg har brukt en RF modul av typen FS 1000A som er en RF modul som sender på frekvensen 433MHz hvilket er en lovlig frekvens å bruke for lav signalstyrke. Akkurat denne modellen av RF modul har ikke veldig lang rekkvidde hvis man ikke lodder fast ekstra antenner. For meg virker den på ca 1-2 meters avstand.
Transmitteren har 3 pins, VCC, GND og DATA. VCC for strøm inn, GND for ground og DATA for å sende data ut.
Receiveren har 4 pins, men 2 av dem er koblet sammen, vanlig di to i mitdten. Di to som er koblet sammen er data pinsen, di andre to er da selvføgelig VCC og GND.
Har brukt en hobby servo som jeg satt fast en supersonic sensor på. Denne finner så ut avstanden til objekten rundt omkring den og printer det til Serial monitor.
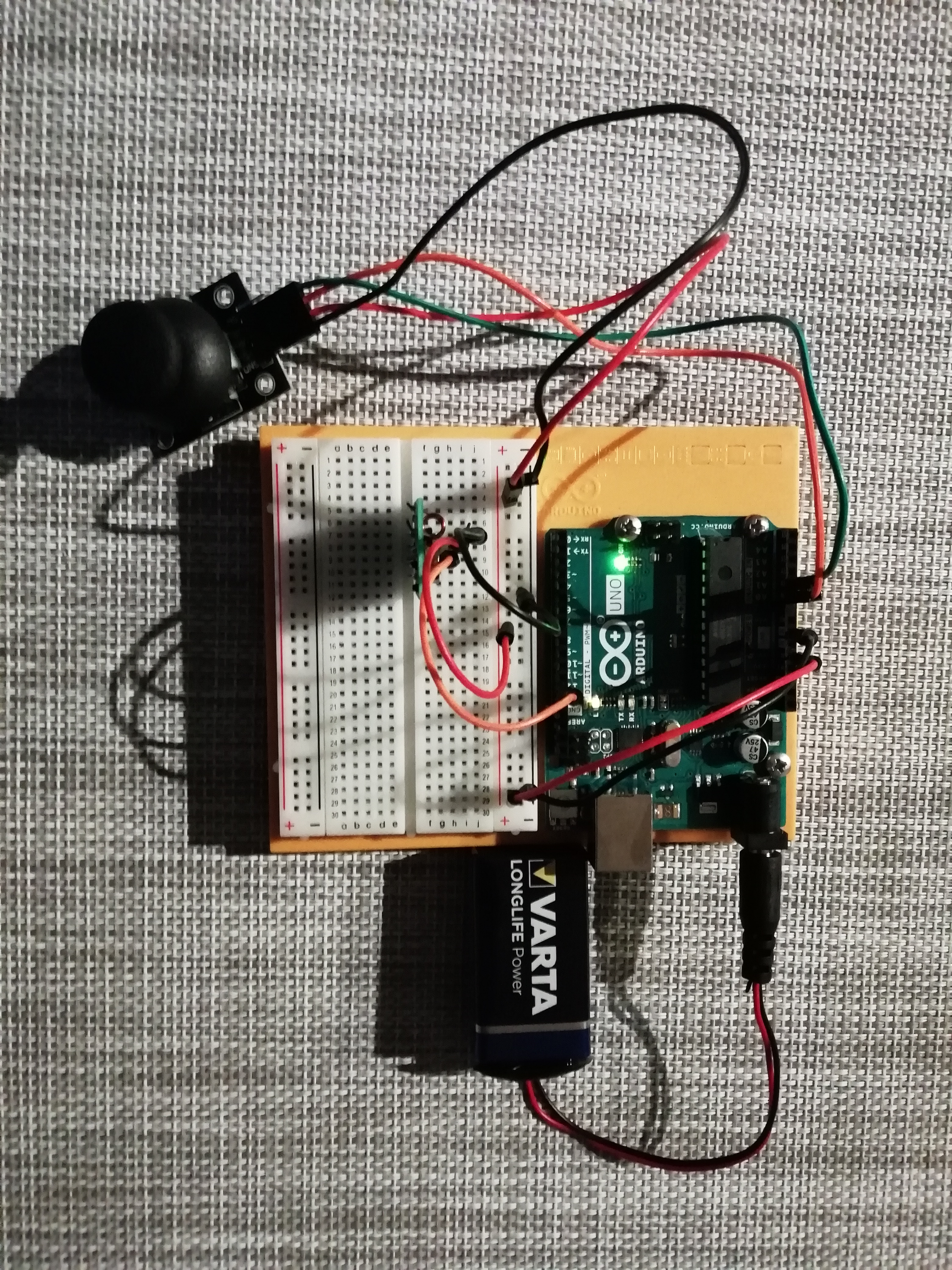
Har brukt en joystick for å kontrollere roboten, den er ansluten til det andre Arduino kortet sammen med en RF transmitter modul. En joystick er i utgangspunkt 2 potentiometere som da maler x-posisjon og y-posisjon, samt i visse fall en push button på toppen.
Joysticken som jeg har brukt har 5 pins, VCC, GND, VRX, VRY og SW. VRX er da potentiometeren for x-verdiene, VRY er potentiometerene for y-verdiene og SW er for push button på toppen i tilfelle man vil bruke den.
Video av testkjøring
Hvordan skal man bygge den?
masse schematics :)
Kode forklart
Joystick:
RF Communication:
Motor control:
Servo control:
super sonic sensor: